基于模型的任务系统运行功能统一规范 导航定位系统运作
随着人工智能与自动化技术的快速发展,基于模型的任务系统在各领域的应用日益广泛,特别是在自动驾驶、机器人导航、智能物流等场景中。为确保这些复杂系统的可靠、高效与协同运行,制定一套统一的运行功能规范至关重要。本文聚焦于任务系统中的核心组成部分——导航定位系统的运作,探讨其在统一规范框架下的设计原则、功能模块、数据交互及安全保障。
一、规范目标与设计原则
基于模型的任务系统运行功能统一规范旨在实现跨平台、跨场景的系统互操作性、可扩展性与可维护性。对于导航定位系统,其设计遵循以下核心原则:
- 标准化接口:定义统一的输入输出格式、通信协议与数据模型,确保不同厂商或开发团队的组件能够无缝集成。
- 模块化架构:将系统分解为感知、定位、规划、控制等独立模块,各模块通过标准接口交互,便于升级与故障隔离。
- 实时性与鲁棒性:系统需在动态环境中实现毫秒级响应,并具备抗干扰能力,应对传感器噪声、信号遮挡等异常情况。
- 安全优先:嵌入多层安全机制,包括数据验证、异常检测与冗余备份,确保导航定位过程的安全可靠。
二、导航定位系统功能模块规范
在统一规范下,导航定位系统的运作可划分为以下关键模块:
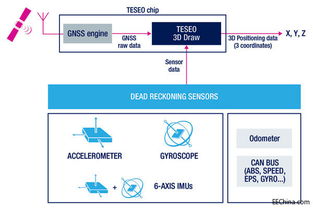
- 环境感知模块:整合多传感器数据(如激光雷达、摄像头、IMU、GNSS),通过标准化数据格式(如点云、图像、位姿信息)输出环境特征。规范要求感知模块具备时间同步与坐标系统一能力,减少数据融合误差。
- 定位与建图模块:基于感知数据实现实时定位(如SLAM技术)与高精度地图构建。规范规定定位结果需包含位置、姿态及置信度信息,并以通用坐标系(如世界坐标系)输出;地图数据需采用分层结构(如语义层、几何层),支持动态更新。
- 路径规划模块:根据任务目标与实时定位信息,生成全局与局部路径。规范要求规划算法遵循安全约束(如避障规则、交通法规),并提供多条备选路径以增强灵活性。
- 运动控制模块:将路径指令转化为执行器的控制信号(如速度、转向角)。规范强调控制指令需平滑连续,并设置阈值防止超调或振荡。
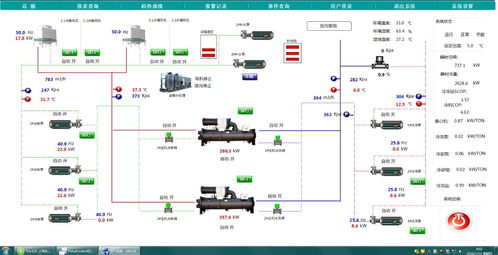
- 状态监控与诊断模块:实时监测系统各模块的运行状态,通过标准化日志与告警机制实现故障预警与根因分析。规范要求该模块支持远程诊断与健康管理。
三、数据交互与通信规范
为确保模块间高效协作,规范对数据流与通信协议作出统一规定:
- 数据格式标准化:采用通用数据描述语言(如Protobuf、JSON Schema)定义传输内容,确保数据结构一致。例如,定位数据包需包含时间戳、坐标值、协方差矩阵等字段。
- 通信协议统一:推荐使用ROS 2、DDS等中间件支持实时发布/订阅模式,并规定服务质量(QoS)策略,如数据可靠性、截止时间等参数。
- 接口抽象化:定义清晰的API接口,如“获取定位信息”、“提交路径请求”,降低模块耦合度,便于第三方组件接入。
四、安全与合规性要求
导航定位系统常涉及人身与财产安全,规范特别强调以下方面:
- 功能安全:遵循ISO 26262等标准,设计故障检测与容错机制,如定位失效时自动切换至备用传感器或进入安全状态。
- 数据安全:对敏感数据(如高精度地图、用户轨迹)进行加密传输与存储,并设置访问权限控制。
- 法规符合性:系统需适配地区性法规,如在自动驾驶中符合当地交通管理部门的技术标准。
五、实施与验证建议
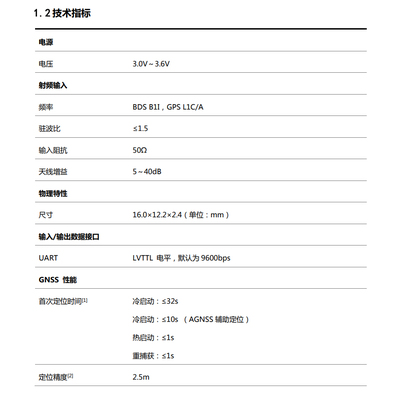
为落实规范,建议采取分阶段实施策略:先在小规模场景中试点,通过仿真测试验证模块功能;再逐步扩展至复杂环境,进行实车或实地测试。验证过程需注重性能指标量化,如定位精度(厘米级)、规划响应时间(<100ms)及系统可用性(>99.9%)。
基于模型的任务系统运行功能统一规范为导航定位系统的设计与集成提供了清晰框架。通过标准化模块、数据流与安全措施,不仅能提升单个系统的性能,还能促进产业生态的协同创新。随着技术进步与场景深化,规范需持续迭代,以适应更智能、更自主的导航定位需求,最终推动无人系统在工业、交通、民生等领域的规模化应用。
如若转载,请注明出处:http://www.wmwulian.com/product/4.html
更新时间:2026-06-11 13:22:52