ROS 2 极简总结 导航系统简介、自定位与运作流程
ROS 2(机器人操作系统2)是一个强大的机器人开发中间件,其导航系统是构建自主移动机器人的核心模块。本文将对ROS 2导航栈的核心概念,特别是其定位系统进行极简。
1. 导航系统简介
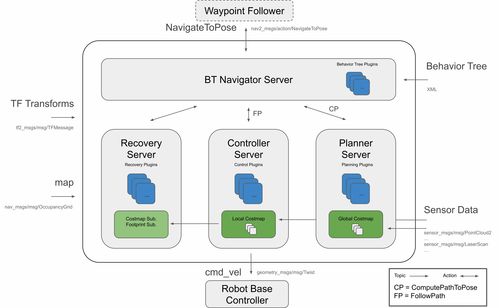
ROS 2导航系统(Navigation2,简称Nav2)是ROS 1导航栈的继承与发展。它提供了一套完整的软件框架,使机器人能够实现从A点到B点的自主移动。其核心目标可概括为:感知环境 -> 确定自身位置 -> 规划安全路径 -> 控制机器人移动。Nav2采用了基于行为的树(Behavior Tree)架构,使其模块化、可配置性和可靠性更强。
2. 自定位:导航的基石
自定位是导航系统知道“我在哪里”的关键环节。在ROS 2导航中,这主要通过自适应蒙特卡洛定位算法实现,对应的核心节点是 nav2_amcl。
- 核心原理:AMCL是一种粒子滤波算法。它维护一组代表机器人可能位姿(位置和朝向)的“粒子”。算法持续进行两个循环:
- 预测:根据机器人的运动模型(如里程计数据),移动所有粒子,模拟机器人可能的移动。
- 更新(校正):利用机器人传感器(通常是激光雷达)观测到的环境特征,与已知的全局地图进行匹配,为每个粒子计算一个权重(权重越高,代表该粒子描述的真实位姿可能性越大)。根据权重对粒子群进行重采样,淘汰低权重粒子,复制高权重粒子,从而使粒子群逐渐收敛到机器人的真实位姿上。
- 输入与输出:
- 输入:激光扫描数据、里程计数据、预先加载的静态地图。
- 输出:机器人在地图坐标系中的估计位姿(
/amcl_pose话题),以及该估计的协方差(不确定性)。
- 特点:AMCL对初始位姿敏感,通常需要一个初始姿态(如通过RViz手动指定或通过服务调用设置)。它擅长在已知地图中进行局部跟踪,但在全局定位失效(如机器人被“绑架”到全新位置)时恢复较慢。
3. 导航定位系统运作流程
一个典型的ROS 2导航定位与运动流程,可以简化为以下协同运作的闭环:
- 建图与地图加载:通过SLAM工具(如
nav2<em>slam</em>toolbox)创建环境的二维占用网格地图,并保存。导航时,地图服务器(nav2<em>map</em>server)将此静态地图加载到系统中,作为全局参考。
- 定位初始化:启动AMCL节点,并提供机器人大致的初始位姿。AMCL开始工作,粒子云扩散在初始位姿周围。
- 实时定位循环:
- 里程计持续提供机器人的相对运动信息(预测)。
- 激光雷达持续扫描环境,获取观测数据。
- AMCL将观测数据与全局地图匹配,不断更新和收敛粒子群,输出当前最优的估计位姿。
- 定位信息被发布到
/tf坐标系变换树中,建立“地图(map)” -> “里程计基准(odom)” -> “机器人基座(base_link)”的变换关系。其中,map->odom的变换由AMCL持续修正,以消除里程计的累积误差。
- 路径规划与跟随:
- 全局规划器(如
nav2<em>navfn</em>planner):接收到目标位姿后,结合全局地图和当前AMCL提供的定位,规划出一条从起点到终点的全局最优或次优路径。
- 局部规划器/控制器(如
nav2<em>regulated</em>pure<em>pursuit</em>controller):负责执行路径。它结合全局路径、高频率的实时定位(来自AMCL)以及最新的传感器数据(用于动态障碍物检测),计算并发送速度命令(线速度和角速度)给机器人驱动系统,使机器人沿路径安全行驶,同时避开未在地图中标注的临时障碍物。
- 闭环与恢复:整个过程中,定位(AMCL)为规划和控制器提供“我在哪”的输入,而控制器的运动结果又通过里程计反馈给AMCL进行下一轮的预测。如果定位丢失或路径被阻断,系统内置的恢复行为(如原地旋转以重新定位、清除代价地图等)会被触发。
**:ROS 2导航系统是一个以自定位(AMCL)为核心反馈,以静态地图为全局知识,通过分层规划与控制**实现自主移动的智能闭环。理解“感知-定位-规划-执行”这一流程,是掌握机器人导航的关键。
如若转载,请注明出处:http://www.wmwulian.com/product/19.html
更新时间:2026-06-19 16:15:24